| |
Researchers: Boris Oreshkin Ph.D. Student, Prof. Mark Coates, Prof. Michael Rabbat
1 Description
Distributed averaging describes a class of network algorithms for the decentralized
computation of aggregate statistics. Initially, each node has a scalar data value,
and the goal is to compute the average of these values at every node (the
so-called average consensus problem). To accomplish this task, nodes
iteratively exchange information with their neighbors and perform local
updates until the value at every node converges to the initial network
average. Much previous work has focused on one-step algorithms where
each node maintains and updates a single value; every time an update
is performed, the previous value is forgotten. Within this framework,
convergence to the average consensus is achieved asymptotically. The
convergence rate is fundamentally limited by network connectivity, and it can be
prohibitively slow on topologies such as grids and random geometric graphs, even
if the update rules are optimized. In this paper, we demonstrate, both
theoretically and by numerical examples, that adding a local prediction
component to the update rule can significantly improve the convergence rate of
distributed averaging algorithms. We focus on the case where the local
predictor is a linear combination of the node’s two previous values (i.e.,
two memory taps), and our update rule computes a combination of the
predictor and the usual weighted linear combination of values received
from neighbouring nodes. We derive the optimal mixing parameter for
combining the predictor with the neighbors’ values, and carry out a theoretical
analysis of the improvement in convergence rate that can be obtained
using this acceleration methodology. For a chain topology on n nodes, this
leads to a factor of n improvement over the one-step algorithm, and for a
two-dimensional grid, our approach achieves a factor of n1∕2 improvement, in
terms of the number of iterations required to reach a prescribed level of
accuracy.
2 Problem Formulation
We assume that a network of n nodes is given, and that the communication
topology is specified in terms of a collection of neighborhoods of each node:
 i ⊆{1,…,n} is the set of nodes with whom node i communicates directly. For
j i ⊆{1,…,n} is the set of nodes with whom node i communicates directly. For
j  i, we will also say that there is an edge between i and j, and assume that
connectivity is symmetric. We furthermore assume that the network is connected.
Initially, each node i = 1,…,n has a scalar value xi(0) i, we will also say that there is an edge between i and j, and assume that
connectivity is symmetric. We furthermore assume that the network is connected.
Initially, each node i = 1,…,n has a scalar value xi(0)  , and the goal is to
develop a distributed algorithm such that every node computes , and the goal is to
develop a distributed algorithm such that every node computes  = =  ∑
i=1nx
i(0).
Previous studies (see, e.g., [Xiao and Boyd, 2004]) have considered linear
updates ∑
i=1nx
i(0).
Previous studies (see, e.g., [Xiao and Boyd, 2004]) have considered linear
updates
where ∑
jWij = 1, and Wi,j≠0 only if j i. One network iteration of the
algorithm is succinctly expressed as the linear recursion x(t) = Wx(t - 1). Let 1
denote the vector of all ones. For this setup, [Xiao and Boyd, 2004] have shown
that necessary and sufficient conditions on W which ensure convergence to the distributed average consensus (DAC), are
where J is the averaging matrix, J =  11T , and ρ(A) denotes the spectral radius
of a matrix A: ρ(A) ≜ max i{|λi| : i = 1, 2,…,n}, where {λi}i=1n denote the
eigenvalues of A. Algorithms have been identified for locally generating
weight matrices that satisfy the required convergence conditions, e.g.,
Maximum–degree and Metropolis–Hastings weights (see [Xiao and Boyd,
2004]). 11T , and ρ(A) denotes the spectral radius
of a matrix A: ρ(A) ≜ max i{|λi| : i = 1, 2,…,n}, where {λi}i=1n denote the
eigenvalues of A. Algorithms have been identified for locally generating
weight matrices that satisfy the required convergence conditions, e.g.,
Maximum–degree and Metropolis–Hastings weights (see [Xiao and Boyd,
2004]).
In [Aysal et al., 2009] , we described a method for accelerating DAC. Its
network-wide equations
can be expressed in matrix form by defining where I is the identity matrix of the appropriate size and
3 Main Results
The following theorem provides a closed form expression for the solution to the
problem of mixing parameter optimization.
Theorem 1 (Optimal mixing parameter). Suppose θ3 + θ2 + θ1 = 1 and θ3 ≥ 1,
θ2 ≥ 0. Suppose further that |λn(W)|≤|λ2(W)|. Then the solution of the
optimization problem is given by the following:
|
Below we demonstrate that the rate at which the spectral radius of accelerated
operator Φ3[αopt] goes to 1 is significantly slower than that of the non-accelerated
one-step operator W. Our main result for the convergence rate of accelerated
consensus follows.
Theorem 2 (Convergence rate). Suppose the assumptions of Theorem 1
hold. Suppose further that the original matrix W satisfies ρ(W - J) ≤
1 - Ψ(n) for some function Ψ : ℕ → (0, 1) of the network size n decreasing
to 0. Then the operator Φ[αopt] satisfies ρ(Φ[αopt] - J) ≤ 1 - . .
|
Next, we investigate the gain that can be obtained by using our accelerated
algorithm. We adopt the expected gain E{τasym(W)∕τasym(Φ3[αopt])} as a
performance metric. The expected gain characterizes the average improvement
obtained by running our algorithm over many realizations of the network
topology. In this case the spectral gap, Ψ(n), is considered to be a random
variable with its value being dependent on the particular realization of the
graph.
Theorem 3 (Expected gain). Suppose the assumptions of Theorem 1 hold.
Suppose further that the original matrix W satisfies E{ρ(W - J)} = 1 - E{Ψ(n)}
for some function Ψ : ℕ → (0, 1) of the network size n decreasing to 0. Then we
have:
|
The following result is useful for characterizing the improvement in the case of
deterministic topologies (grid, chain, etc.).
Corollary 1. Suppose that the assumptions of Theorem 3 hold and suppose in
addition that ρ(W - J) = 1 - Θ(n-β). Then the improvement in asymptotic
convergence rate attained by the accelerated algorithm is polynomial in the size of
the network:
The following theorem provides the indication of the fact that minimizing the
spectral radius is equivalent to minimizing the total averaging time under certain
conditions.
Theorem 4. Let Φ n×n be a consensus operator. Suppose that there exists
finite T* ℕ such that, for any t ≥ T*, the following holds: Suppose further there exists some 0 < c < 1 such that Then for ε → 0 ,
|
4 Numerical Experiments and Discussion
Figure 1 compares the MSE curves for the proposed algorithm with the optimal
one-step matrix of [Xiao and Boyd, 2004] and two versions of polynomial filter
consensus of [Kokiopoulou and Frossard, 2009], one using 3 taps and the other
using 7 taps. We see that in the RGG scenario (Fig. 1(a)), our algorithm
outperforms the optimal one-step matrix and polynomial filter with 3 memory
taps and converges at a rate similar to that of the 7-tap version of polynomial
filter (The calculation of optimal weights in the polynomial filter framework
quickly becomes ill-conditioned with increasing filter length, and we were not able
to obtain stable results for more than 7 taps on RGG topologies. Note that in
their paper, [Kokiopoulou and Frossard, 2009] also focuse on filters of
length no more than 7.). We conclude that for RGGs, our algorithm has
superior properties with respect to polynomial filter since it has better error
performance for the same computational complexity, and our approach is
suitable for completely distributed implementation. Moving our attention
to the chain topology (Fig. 1(b)) only emphasizes these points, as our
accelerated algorithm significantly outperforms even the 7-tap polynomial
filter.
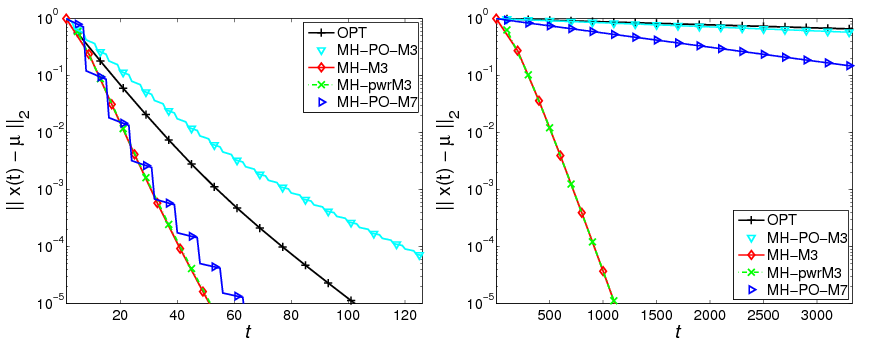
| Figure 1: | MSE versus time step for the consensus algorithms, n = 200.
Optimal weight matrix (OPT): +; optimal polynomial filter with 3 taps
(MH-PO-M3): ▽, 7 taps (MH-PO-M7): ⊳; proposed accelerated consensus
(M = 3 and MH matrix) with known λ2(W) (MH-M3): ◇ and with the online
estimation of λ2(W) (MH-pwrM3): ×. (a) Random Geometric Graph (on
the left). (b) Chain Graph (on the right) |
|
To investigate the robustness and scalability properties of the proposed
algorithm, we next examine the processing gain, Tave(WMH)∕Tave(Φ3[α*]),
with respect to the MH matrix. We see from Fig. 2(a) that in the RGG
setting, the proposed algorithm always outperforms DAC with the optimal
weight matrix and polynomial filter with equal number of memory taps,
and our approach scales comparably to 7-tap polynomial filter. On the
other hand, in the chain graph setting (Fig. 2(b)) the proposed algorithm
outperforms all the competing algorithms with the gain (w.r.t. the MH
matrix) scaling linearly with n. These results confirm that it is possible to
implement the accelerated DAC in a completely distributed fashion and still
obtain significant processing gains that scale well with the size of the
network and match those theoretically predicted for the optimal (oracle)
algorithm.
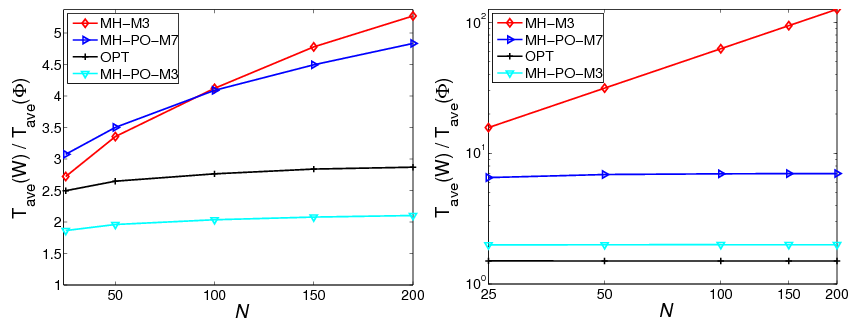
| Figure 2: | Processing gain. Optimal weight matrix (OPT): +; optimal
polynomial filter with 3 taps (MH-PO-M3): ▽, 7 taps (MH-PO-M7): ⊳;
proposed accelerated consensus, M = 3 with known λ2(W) and MH matrix
(MH-M3): ◇. (a) Random Geometric Graph (on the left). (b) Chain Graph
(on the right) |
|
References
[Aysal et al., 2009] Aysal, T., Oreshkin, B., and Coates, M. (2009).
Accelerated distributed average consensus via localized node state
prediction. to appear, IEEE Trans. Sig. Process.
[Kokiopoulou and Frossard, 2009] Kokiopoulou, E. and Frossard, P.
(2009). Polynomial filtering for fast convergence in distributed consensus.
IEEE Trans. Sig. Process., 57(1):342–354.
[Tsitsiklis, 1984] Tsitsiklis, J. (1984). Problems in Decentralized Decision
Making and Computation. PhD thesis, Massachusetts Institute of
Technology.
[Xiao and Boyd, 2004] Xiao, L. and Boyd, S. (2004). Fast linear
iterations for distributed averaging. Systems and Control Letters,
53(1):65–78.
Publications:
B.N. Oreshkin, M.J. Coates,
and M.G. Rabbat, Optimization and analysis of distributed
averaging with short node memory. arXiv:0903.3537v1;
available at http://arxiv.org/abs/0903.3537v1.
|

 Return to Network Monitoring Projects
Return to Network Monitoring Projects

![X (t) = ΦM [α ]X (t - 1),](images/oreshkin/fast_cons_M3_ifac5x.png)
![WM [α] ≜ (1 - α + αθM )W + α θM- 1I
T T T
X (t - 1) ≜ [x (t - 1) ,...,x (t - M + 1) ]](images/oreshkin/fast_cons_M3_ifac6x.png)
![⌊ ⌋
WM [α ] α θM- 2I ... αθ2I αθ1I
| I 0 ... 0 0 |
Φ [α ] ≜ || 0 I ... 0 0 || .
M |⌈ |⌉
... ... ... ... ...
0 0 ... I 0](images/oreshkin/fast_cons_M3_ifac7x.png)
![αopt = argmin ρ(Φ3 [α] - J )
α≥0](images/oreshkin/fast_cons_M3_ifac8x.png)

![E {τasym(W )∕ τasym(Φ3 [αopt])} ≥ E{ Ψ(n )} -1∕2](images/oreshkin/fast_cons_M3_ifac11x.png)
![τasym(W )∕τasym (Φ3[αopt]) = Ω (nβ∕2)](images/oreshkin/fast_cons_M3_ifac12x.png)


